Hi, I’m Matt
I’m an autonomy engineer who’s passionate about quadcopters, flight vehicles and just about anything that moves. This space is a showcase of some of the cool projects I’ve worked on recently. More about me here.
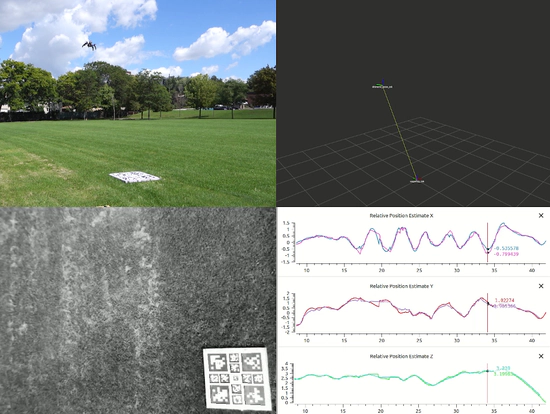
Visual-Inertial Relative Pose Estimation for Quadrotor Landing
Final project where I began developing a quadrotor capable of autonomously flying to a target location and landing based on visual-inertial navigation.
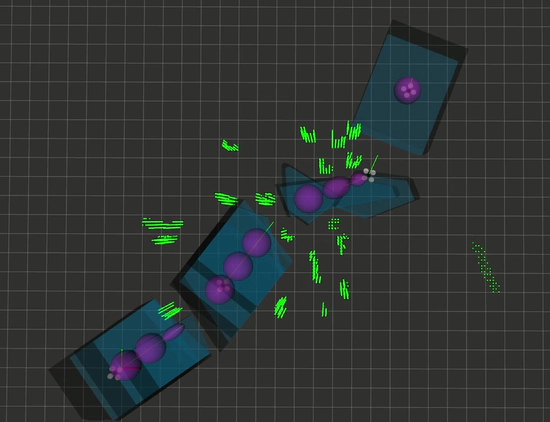
Hierarchical Trajectory Planning for Quadrotor Flight in Unknown Environments
Course project for AER 1516 - Motion Planning for Robotics.

Batch Pose Estimation for a Stereo Camera
Final assignment for AER 1513 - State Estimation for Robotics.