Matt Brymer
Matt Brymer
About
Projects
Resume
Light
Dark
Automatic
Quadrotor
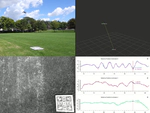
Visual-Inertial Relative Pose Estimation for Quadrotor Landing
Final project where I began developing a quadrotor capable of autonomously flying to a target location and landing based on visual-inertial navigation.
Sensor Fusion
Quadrotor
Computer Vision
Hierarchical Trajectory Planning for Quadrotor Flight in Unknown Environments
Course project for AER 1516 - Motion Planning for Robotics.
Trajectory Planning
Quadrotor